XJTU-Tripler 设计详解
1.需求分析
1.1 背景
Design Automation Conference 自动设计大会是全球久负盛誉的产学研交流盛会,也是计算机学会推荐的A类会议之一。2019年第56届DAC大会在拉斯维加斯举行。其中系统设计竞赛(System Design Contest, SDC)的任务为面向端侧设备进行快速的目标检测。该比赛由Xilinx、大疆和英伟达赞助。该比赛针对比赛方给定无人机视角的训练数据集(9万张分辨率为360x640的图片,单目标标注)进行训练,在比赛方自有的5万张测试数据集上进行测试。最终检测精度IoU(Intersection over Union)高、且能量消耗低者胜出。
该竞赛分别提供了NVIDIA TX2和Xilinx Ultra96的设计平台两个赛道。我们团队参加了FPGA赛道,在官方提供的搭载了Xilinx UltraScale+ ZU3的Ultra96平台上进行开发。Ultra96是一款优秀的Xilinx ZYNQ的开发板,针对低功耗IoT环境而设计。其PS侧搭载四核ARM Cortex-A53 CPU,主频为1.5GHz;软件方面可以使用基于Python的PYNQ框架进行开发。Ultra96平台以及ZU3的PL侧资源如下图所示。
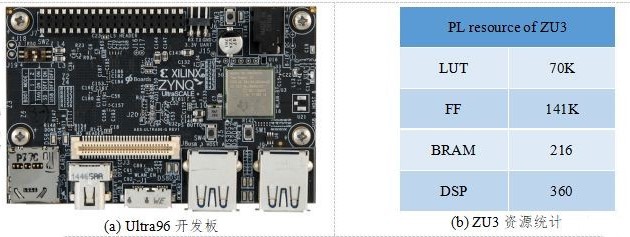
图 1 Xilinx提供的FPGA开发环境介绍
1.2 动机
为了达到检测精度与能耗的平衡,我们团队选择并优化了面向端侧的轻量级神经网络框架。并针对ZU3的资源限制,精简了我们团队设计的一个可以支持通用网络的DNN加速器(HiPU),将其部署在ZU3的PL侧。主要工作分为针对硬件平台的算法优化和架构设计优化两部分:
算法上的优化主要有:
1) 选择ShuffleNet V2作为特征提取的主框架;
2) 选择YOLO作为单目标位置的回归框架;
3) 对神经网络进行8bit量化。
HiPU的优化主要有:
1) 支持CONV,FC,Dep-wise CONV,Pooling,Ele-wise Add/Mul等操作,峰值算力为268Gops,效率大于80%;
2) 支持Channel shuffle、divide、concat操作,且不消耗额外时间;
3) 提供C、RISC-V汇编接口的API,调度灵活;
4) HiPU完全由PL侧实现,不依赖PS侧。PS主要工作负载为图片预处理和结果输出上。
经过上述优化,我们团队的设计在比赛方的数据集上测得如下结果:准确率IoU为61.5%;能耗为9537J,帧率为50.91Hz,功率为9.248W。
2. 算法框架设计
2.1 任务分析
本次竞赛的训练集由大疆提供,部分图片如下图所示。在确定算法之前,我们团队首先对训练数据集的特点进行了分析:
1) 图片尺寸均为360x640,不需要对图片进行resize操作进行归一化;
2) 所有测试图片均是无人机视角。标定框的大小从36像素到7200像素不等,算法需要支持各种大小的目标检测;
3) 所有图片共12大类(95个子类),包括boat (7), building (3), car (24), drone (4), group (2), horse-ride(1), paraglider(1), person (29), riding (17), truck (2), wakeboard(4), whale(1)类别。算法在设计时需要对这12类物体进行分类;
4) 即使测试图片中出现多个相似的目标,标定框也是指定固定的一个目标。即训练时需要适当的过拟合。
图 2 训练集的部分图片
2.2 单目标检测网络选择
为满足移动端的检测实时性,我们团队最终选定了YOLO作为基础检测算法。并将其中的特征提取网络替换为轻量级的ShuffleNet V2,其参数规模略大于1X。如下图所示为我们定制的单目标检测网络,ShuffleDet。
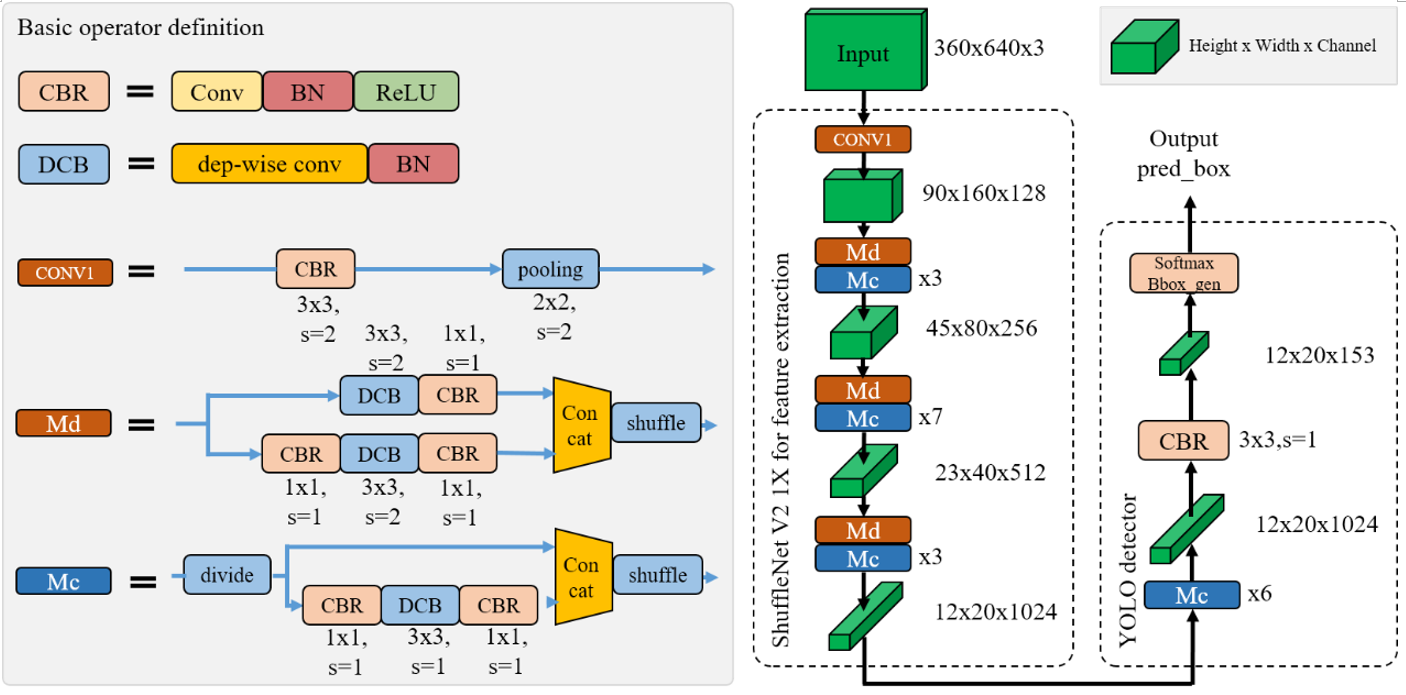
图 3 ShuffleDet的网络结构示意图
2.3 神经网络的训练与量化
我们团队首先在ImageNet数据集上预训练一个标准的ShuffleNet V2分类网络。待模型收敛后,将其中的特征提取部分的参数迁移到ShuffleDet网络中。使用比赛方的训练集进行其他层的参数的训练。
为了适应FPGA的定点运算,待整体参数训练完成后,需要对所有参数进行量化操作。我们团队将网络参数和feature map均量化为8bit定点。量化过程主要分为以下几步:1) 将BN层合并到参数中;2) 将合并后的参数进行对称量化;3) 量化后的参数如果直接使用,精度损失过于严重。因此量化后还需要对参数进行fine tune。如下图所示为量化操作的示意图。
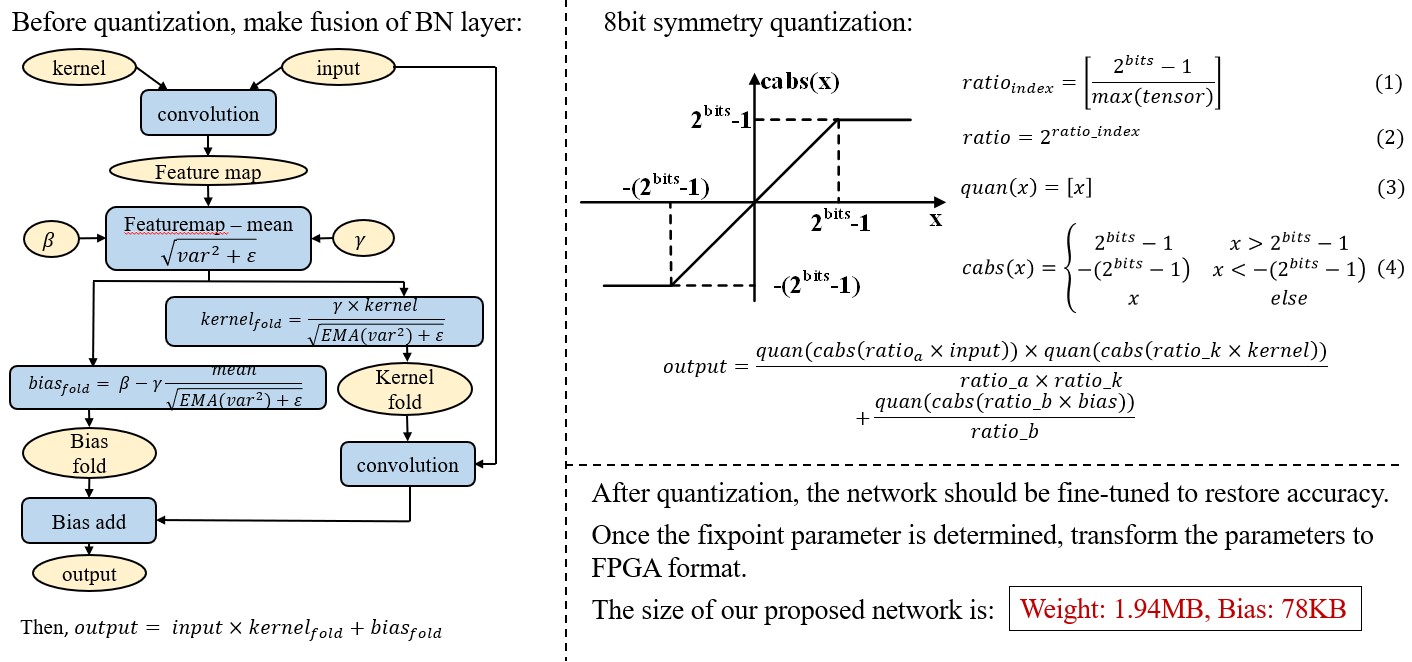
图 4 网络参数的量化流程
经过量化后,我们使用的ShuffleDet网络的卷积层数约为74层,权重约为1.94MB,Bias约为78KB。
3. 计算架构框架设计
3.1 HiPU整体介绍
由于我们团队设计的HiPU主要面向专用集成电路(AISC),FPGA上的设计实现主要是进行功能的验证,因此,针对赛方提供的计算平台,我们需要进行适当的裁剪需,以适应ZU3的资源。如下图所示为裁剪后的HiPU设计框图,及其特性。HiPU工作在233MHz,其峰值算力为268Gops;采用C/RISC-V汇编作为编程接口,卷积效率平均在80%以上。
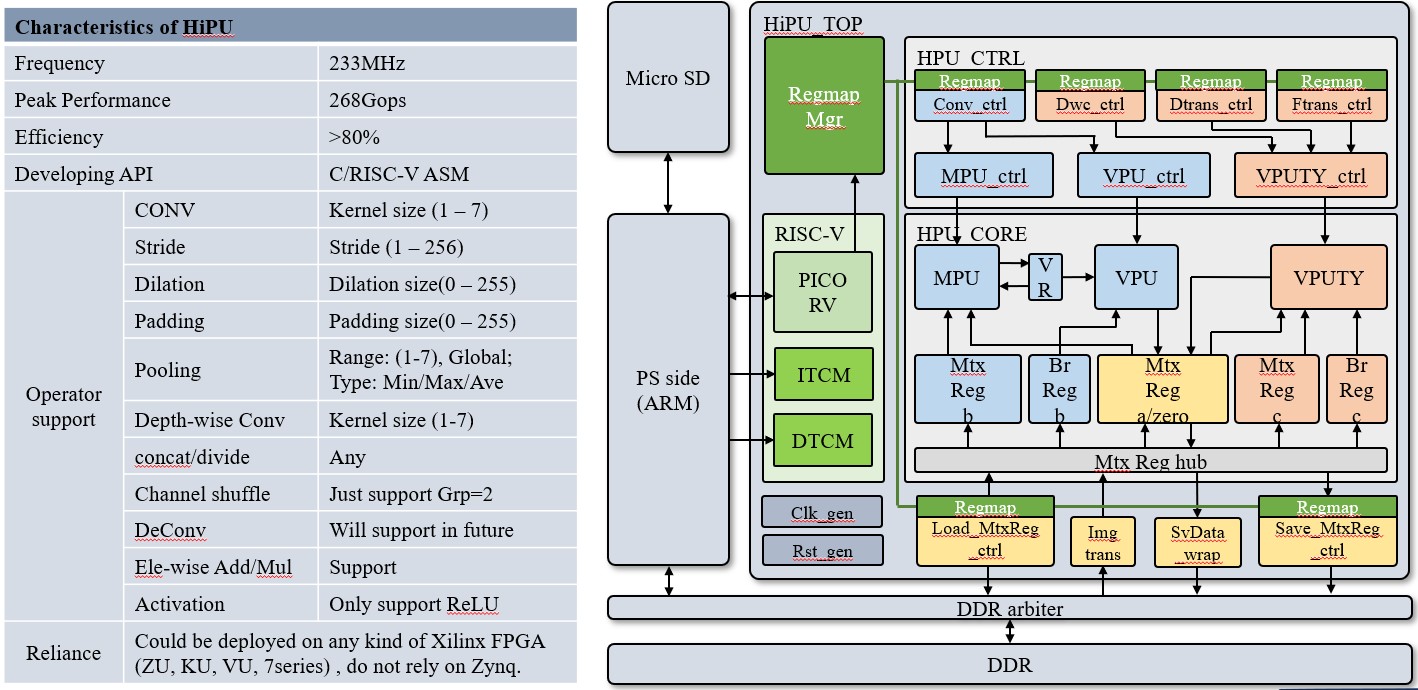
图 5 HiPU的结构框图与特性
HiPU支持各种常见的NN运算,包括:CONV,FC,Dep-wise CONV,Pooling,Ele-wise Add/Mul等运算。其中FC也可以做到接近100%的计算效率。
HiPU支持channel方向的shuffle,divide,concat操作。当这些操作紧接在卷积运算之后时,可以在硬件上进行合并,不消耗额外的时间。
HiPU可以工作在任何种类的Xilinx FPGA上,不受Zynq架构的限制。
HiPU底层实现矩阵运算,向量运算,以及标量运算。在做好调度的情况下,可以支持任意类型的并行计算。未来将实现稀疏矩阵运算的优化,从而支持高效率的DeCONV运算,feature map稀疏优化。
3.2 HiPU优化点分析
1) 通过层间级联减少所需的DDR带宽
HiPU设计性能有两个重要的方面:一个方面是MAC运算单元的利用率;一个是数据传输网络是否可以匹配MAC所需的数据。其中数据传输网络的限制大多数来自DDR接口。本设计针对DDR接口进行专门的优化。
由于HiPU中SRAM的大小限制,无法将一层feature map的数据完全放在HiPU的SRAM中。采用平常的计算次序则需要将每一层的feature map计算结果返回到DDR中存储。这样一来每一层的feature map数据都需要一次DDR的访问,对DDR的带宽需求非常大,也会消耗额外的功耗
我们团队通过层间级联的方式降低DDR的带宽需求。以ShuffleNet的bottleneck为分界,从每个bottleneck的输入处从DDR读取一行feature map,依次计算完所有的层后,输出的一行feature map才写回到DDR。依次计算完所有行。如下图所示为Module C的层间级联计算次序。
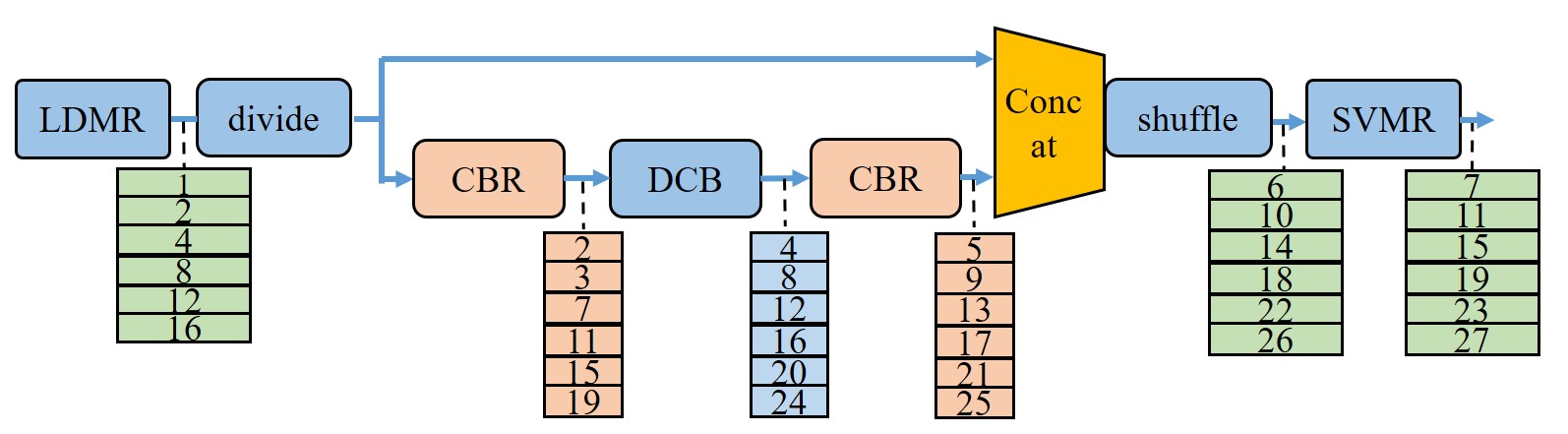
图 6 Module-C采用层间级联计算方式
2) 输入图像格式转换以提升处理效率
HiPU一次并行计算8个输入channel。然而网络第一层输入图像仅有RGB这3个通道,导致HiPU计算效率仅为3/8。因此,我们团队针对输入图像设计了一个转换模块。如果Conv1的kernel的width为3,则将输入图像的通道从3扩展到9。最终使得第一层的处理效率从0.38提升到了0.56,其转换示意图如下图所示。
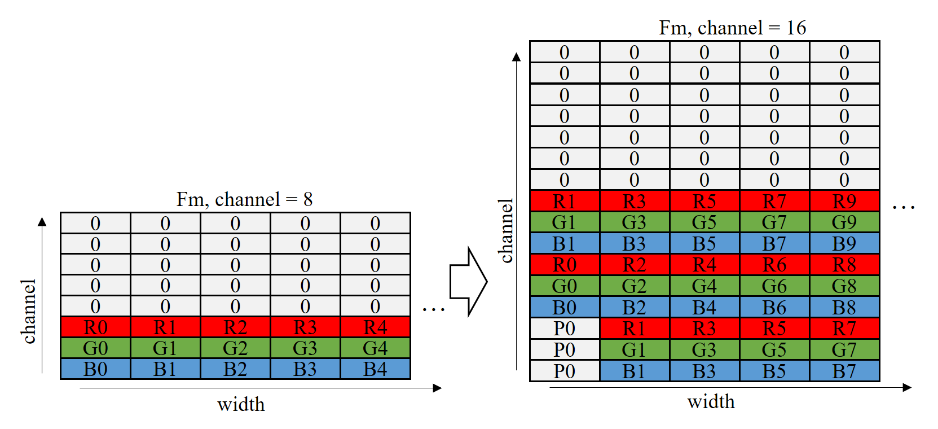
图 7 输入图像在行方向上的转换
3.3 系统优化设计
1) 图像解码与卷积神经网络计算并行化
由于HiPU仅仅依赖Zynq的PL侧的资源进行设计,PS侧的资源可以空出来做系统IO相关的工作。我们团队在处理当前图片的检测运算时,在PS侧预读并解码下一幅图片,提高处理的并行度,从而使整体检测帧率从30.3Hz提高到50.9Hz。
如下图所示为图像解码与卷积神经网络并行化的示意图。

(a) 并行化之前的工作流程
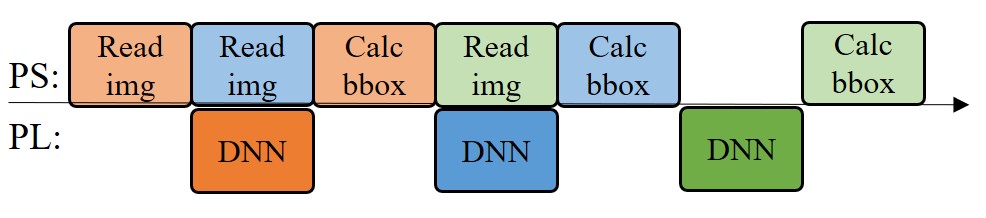
(b) 并行化之后的工作流程
图 8 图像解码与卷积神经网络并行化的示意图
2) 使用C代码加速PS侧原来的Python代码
使用C代码重构PS侧比较耗时的操作,并在Pynq框架中采用ctypes接口调用重构的C代码: 1) 预先计算PL侧数据中置信度和bbox坐标的地址指针;2) 找到最大的置信度和对应的BBox的坐标,然后根据相对坐标计算出绝对坐标。
3) 使用门控时钟降低PL侧的能耗
为了降低系统的能量消耗,设计了门控时钟策略。当HiPU计算完一张图片的时候自动关闭时钟,下一张图片开始计算的时候再激活时钟。设置这个策略主要基于以下两个原因:
首先,系统对jpg格式图片解算的时间不固定,当SD卡型号不固定的时候,其均值在7ms-12ms之间,部分图片解算时间最大值可以到达100ms;
其次,系统的功耗测量进程和其他额外开销会占用一部分的cpu时间,并且PS和PL共享DDR带宽,这导致了HiPU在166Mhz的时帧率到达约50hz,但是升高HiPU到200Mhz时,系统处理帧率仍然保持在50hz左右。
上述两个原因会导致HiPU处理时间和图片jpeg解算时间匹配变得不固定;当HiPU处理图像时间比图像解算时间短时, HiPU会“空跑”浪费能量。另外,针对抢占DDR带宽的情况,还需继续优化。
4. 竞赛结果分析
如下表所示为DAC19的竞赛结果,全球共有58支队伍注册了FPGA比赛任务,但最终只有11支队伍提交了设计(完赛率19%),相比GPU赛道52支队伍注册比赛,最终有16支队伍提交设计(完赛率30.8%),也可以反应出FPGA比赛任务的难度。最终我们团队获得了第2名的成绩。冠军为iSmart3,由UIUC、IBM、Inspirit IoT公司联合组队,季军为SystemsETHZ来自ETH Zurich的队伍。通过与其他团队的交流,我们团队使用的神经网络规模是最大的,优势是高性能的DNN加速器,遗憾是算法方面的优化还不到位,最终竞赛成绩如下:
DAC19 系统设计竞赛排名

资源情况比较

我们设计的ShuffleDet算法同时在TX2平台上也进行了部署,下表是两者的分析对比。可以看出8bits量化后造成了0.056的IoU损失(-8.3%),但带来了28.87的帧率提升(+131%)和8309J的能量减少(-46.56%)。

图9 ShuffleDet在TX2和Ultra96 FPGA平台上的性能比较
XJTU-Tripler是由西安交通大学 人工智能与机器人研究所 任鹏举副教授所在的认知计算架构小组完成的设计。
团队成员:赵博然,赵文哲,夏天,陈飞,樊珑,宗鹏陈,魏亚东,涂志俊,赵之旭,董志伟等